机器学习已被验证为让计算机完成特定任务的有效策略,通过不断的试错和数据解析训练“教会”计算机学习任务的策略,通过自学习培育出精通这项任务的人工智能机器或者程序计算模型。来自哥大工程学院(Columbia Enginering)的机器人团队一项最新的研究,在深度学习方面又更向前迈进了一步。
在研究中,团队不再向机器人直接给定一个有特定目标的任务,而是通过限制性的初始条件和控制能力,让机器人在自学习进程中自主意识到如何学习才能完成任务目标,简单地说就是能够自建模型完成任务。
实验中的机器人依靠自己搞清楚它其实是一个机器人,为一项专门的任务设计,但在测试开始时,它连自己身体的外观如何都不清楚,但事情很快发生了转机。
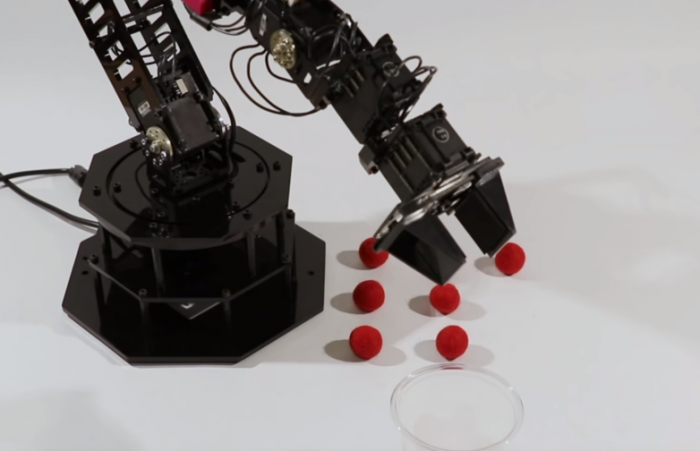
发表于《科学 机器人》期刊的论文中,研究团队解释了机器人遇到的第一个难关,就是搞清楚自己躯干的形状。机器人拥有数个关节构成的长机械臂,起初机器人只是随机胡乱地挥动机械臂,尝试找到其机械臂的运动能力和移动范围。
最终,机器人掌握了如何精确移动机械手的足够知识,它开始拾捡物体,把它们精确地放入容器,到100%的精确率,它根据给予的能力自主意识到任务目标和完成目标。
这一过程中,完全没有人直接告知机器人该做什么,研究者只是不断地改变其计算能力并限制一定条件。起初机器人拥有能够精确测量其动作的感知能力,类似人能够“看”到自己手在运动时的动作。后来这一能力被团队移除了,找到目标前机器人度过了一段难挨的时期,但机器人仍然能够以44%的精确率拾取并放置物体,令人印象深刻。
尽管这距离实现人工自主意识还很远,但这是一个有趣的实验,展示了计算机算法有能力给予机器人学习自身和周遭事物自建问题解决模型的概念。

鱼跃医疗斥资近7亿,增资子公司、参设投资基金究竟为哪般?

[图]新证据表明Galaxy S10E电池为3000mAh S10+电池为4000mAh
奇瑞星途TX预售价爆光,搭载最强1.6T发动机,这是要火啊

再冷也要好好打扮自己!看看街头的她们如何hold时尚造型?

张雨绮在节目上暴躁说不录节目了,了解事情原委观众都表示了理解

搜狐 2018 年第 4 季度营收 4.82 亿美元,搜狗搜索相关营收占据一半

微信推出“亲属卡”横向获客,2019“支付大战”拉开序幕

这2类人最适合考公务员,不报考有些可惜,你是其中一类吗?

科技与健康产业融合发展研讨会在广州成功召开

长沙谱蓝网络科技:数字技术领域的探索者

北京景盛达环保科技有限公司入围《信用中国》栏目

江苏增光新材料科技股份有限公司入围《信用中国》栏目

跃动格子:科技与运动的完美结合,开启你的无限可能

重磅!盎锐科技与杭州富阳区达成战略合作,共筑数字生产力高峰!

实力亮相SUCE 2024 | TCL光伏科技智慧能源解决方案行业领先

深圳市太龙视觉科技有限公司:LED显示与虚拟拍摄领域的创新引领者

安美科技风采录-第八届中国润滑油技术创新及行业发展论坛

【张宝山低GI山药粉】轻松减脂先控糖,既要减又要养!

五秩芳华,行以致远|章光101五十周年庆典隆重举行

科创引领,向新而行:毛发生命科学论坛隆重举行

优化营商环境迫在眉睫,民企压力巨大,百联岂能落井下石!
优化营商环境迫在眉睫,民企压力巨大,百联岂能落井下石!
优化营商环境迫在眉睫,百联涸泽而渔,民企压力大
优化营商环境,国企焚林而猎,上海要动真格